





Geomagic Phantom Premium1.5/六自由度力反馈
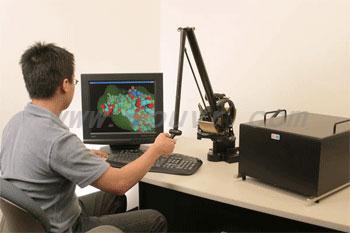
Geomagic Phantom系列产品中首屈一指的力反馈产品Phantom Premium 六自由度力反馈设备(原Sensable)能够提供高度精确的3D对象操作,使用户能够探索要求六自由度(6DOF)而非3自由度力反馈的应用领域,例如虚拟装配、虚拟样机、维护路径规划、远程操作和分子模拟。

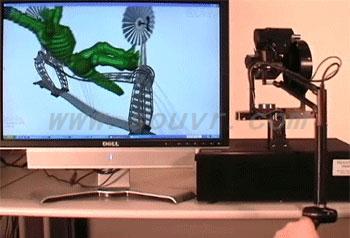
Phantom Premium六自由度力反馈装置不但可以沿x轴、y和z轴力反馈,而且还能以3个转动自由度的模拟转矩力反馈:偏航、俯仰和侧滚。这些自动设备集成六自由度后可提供更为完整的力反馈,使用户可在虚拟配件路径上感觉碰撞、反作用力,或是借助遥控远程的自动控制设备来支持旋转的力量。
Phantom Premium六自由度系列力反馈设备包括三种型号。Phantom Premium 1.5/6DOF 和1.5HF/6DOF提供一系列绕肘部旋转接近下臂的运动。Phantom Premium 3.0 6DOF为较大的力反馈装置,提供绕肩膀旋转接近完整手臂的一个更大的运动范围。
Phantom Premium 6DOF力反馈设备也可配备任选件末端效应器,提供捏合功能,模拟第7个自由度,适合医学、制造等应用领域。
Phantom Premium1.5和1.5高力(HF)六自由度设备

Phantom Premium1.5/6DOF和1.5HF/6DOF力反馈设备有一系列绕肘部旋转接近下臂的运动。这些器件提供三个平移自由度的力反馈,以及在偏航、俯仰和滚转方向三个旋转自由度的转矩反馈。Premium 1.5HF装置包括一个内置的齿轮箱选项,提供更大的力量。1.5/6DOF和1.5 HF/6DOF设备通过并口(EPP)接口连接到PC。
Phantom Premium 3.0 6DOF
3.0/6DOF有一系列绕肩膀旋转接近手臂的运动。这些器件提供了三个平移自由度的力反馈,以及偏航、俯仰和滚转方向三个旋转自由度的转矩反馈。3.0/6DOF设备通过并口(EPP)接口连接到PC。
Phantom六自由度设备的7自由度选项

PHANTOM 六自由度系列力反馈设备采用了一项新的手柄设计,使连接可互换的末端效应器,提供捏合功能 – 7自由度位置感应与六自由度力反馈。充分利用了在一个完整的六自由度力反馈控制器上添加两个不同的捏合手柄的所有优越性。
应用
复杂几何形状精简变形模型之间接触的六自由度力反馈渲染
Jernej Barbič(Carnegie Mellon大学)和Doug L. James(康奈尔大学)撰写了一份题为如何模拟均具有复杂几何形状的刚体和精简变形有限元对象之间的力反馈接触的论文。---自适应采样减少变形模型的关键时间分布接触的六自由度力反馈渲染。
OpenHaptics与QuickHaptics micro API
Phantom Premium集合应用QuickHaptics micro API能够快速进行方案设计和部署。通过QuickHaptics,您可以使用8行编程代码而不是200行编写一个简单的图形/力反馈应用程序
特点
▶最大的力反馈工作区和高精密仪器,满足了广范围研究项目或商业应用的需求
▶ 坚固的设计
▶ 广泛的运动范围
▶ 六自由度力反馈
▶ 设备通过并行端口(EPP)接口连接到PC
▶ CE认证
Geomagic Phantom Premium 6DOF(六自由度)特征
▶高精密仪器
▶ Premium系列产品中最大的力反馈工作区
▶ Premium系列产品中最大的力量
▶运动范围 - 可容纳绕手肘或肩膀旋转的全方位运动
▶刚度范围
▶六自由度定位设备
▶六自由度力反馈,包括扭矩X,Y,Z
▶患者保护
▶ 支持OpenHaptics与QuickHaptics micro API工具包
▶ CE认证
Phantom Premium1.5/6DOF、1.5 HighForce/6DOF 和3.0/6DOF力反馈设备
Phantom1.5/6DOF、1.5 HighForce/6DOF和3.0/6DOF设备使用户能够探索需要六自由度力反馈的应用领域。这些器件提供了三个平移自由度的力反馈,及偏航、俯仰和滚转方向三个旋转自由度的转矩反馈。 1.5/6DOF和1.5 HighForce/6DOF设备有一系列绕肘部旋转接近下臂的运动。3.0/6DOF有一系列绕肩膀旋转接近手臂的运动。PHANTOM1.5/6DOF、1.5 HighForce/6DOF和3.0/6DOF设备通过并口(EPP)接口连接到PC。PHANTOM 六自由度系列力反馈设备还可配备备选件7自由度末端效应器,提供捏合功能。
::产品规格::
| 规格 | Geomagic Phantom Premium 1.5/六自由度力反馈 |
| 工作空间 | |
| 平移: | 381Wx267Hx191D mm |
| 旋转 | |
| 绕Y轴旋转(Yaw): | 297度/5.18弧度 |
| 绕X轴旋转(Pitch): | 260度/4.54弧度 |
| 绕Z轴旋转(Rool): | 335度/5.85弧度 |
|
活动范围 |
|
| 范围: | 肘下臂的旋转运动范围 |
| 位置分辨率 | |
| 平移: | 860 dpi/0.03mm |
| 旋转 | |
| 绕X和Y轴旋转: | 0.0023度/0.00004弧度 |
| 绕Z轴旋转: | 0.0080度/0.00014弧度 |
|
最大输出力(标称位置) |
|
| 平移: | 1.9lbf/8.5N |
| 绕X和Y轴旋转: | 73oz-in/515mNm |
| 绕Z轴旋转: | 24oz-in/170mNm |
| 强度 | |
| 强度: | 20 lbf in-1 {2}.{3} N mm-1 |
| 反馈力方向 | |
| 6DOF反馈力方向: | x, y, z, Tx, Ty, Tz |
| 位置传感 | |
| 位置传感/输入(6DOF): | x,y,z,左右晃动,上下翻动,侧向移动 |
| 接口: |
并行端口 |
| 可选的最终效果器: | 拇指垫(夹),剪刀 |
::应用范围::
适用于虚拟现实、虚拟模型、多媒体和分子模型化、科学教研等诸多应用领域。
::技术特征::
▶高精密仪器
▶ Premium系列产品中最大的力反馈工作区
▶ Premium系列产品中最大的力量
▶ 运动范围 - 可容纳绕手肘或肩膀旋转的全方位运动
▶ 刚度范围
▶ 六自由度定位设备
▶ 六自由度力反馈,包括扭矩X,Y,Z
▶ 患者保护
▶ 支持OpenHaptics与QuickHaptics micro API工具包